By popular suggestion this text was cross-posted to Medium.
Suppose you are starting a new data science project (which could either be a short analysis of one dataset, or a complex multi-year collaboration). How should your organize your workflow? Where do you put your data and code? What tools do you use and why? In general, what should you think about before diving head first into your data? In the software engineering industry such questions have some commonly known answers. Although every software company might have its unique traits and quirks, the core processes in most of them are based on the same established principles, practices and tools. These principles are described in textbooks and taught in universities.
Data science is a less mature industry, and things are different. Although you can find a variety of template projects, articles, blogposts, discussions, or specialized platforms (open-source [1,2,3,4,5,6,7,8,9,10], commercial [11,12,13,14,15,16,17] and in-house [18,19,20]) to help you organize various parts of your workflow, there is no textbook yet to provide universally accepted answers. Every data scientist eventually develops their personal preferences, mostly learned from experience and mistakes. I am no exception. Over time I have developed my understanding of what is a typical "data science project", how it should be structured, what tools to use, and what should be taken into account. I would like to share my vision in this post.
The workflow
Although data science projects can range widely in terms of their aims, scale, and technologies used, at a certain level of abstraction most of them could be implemented as the following workflow:
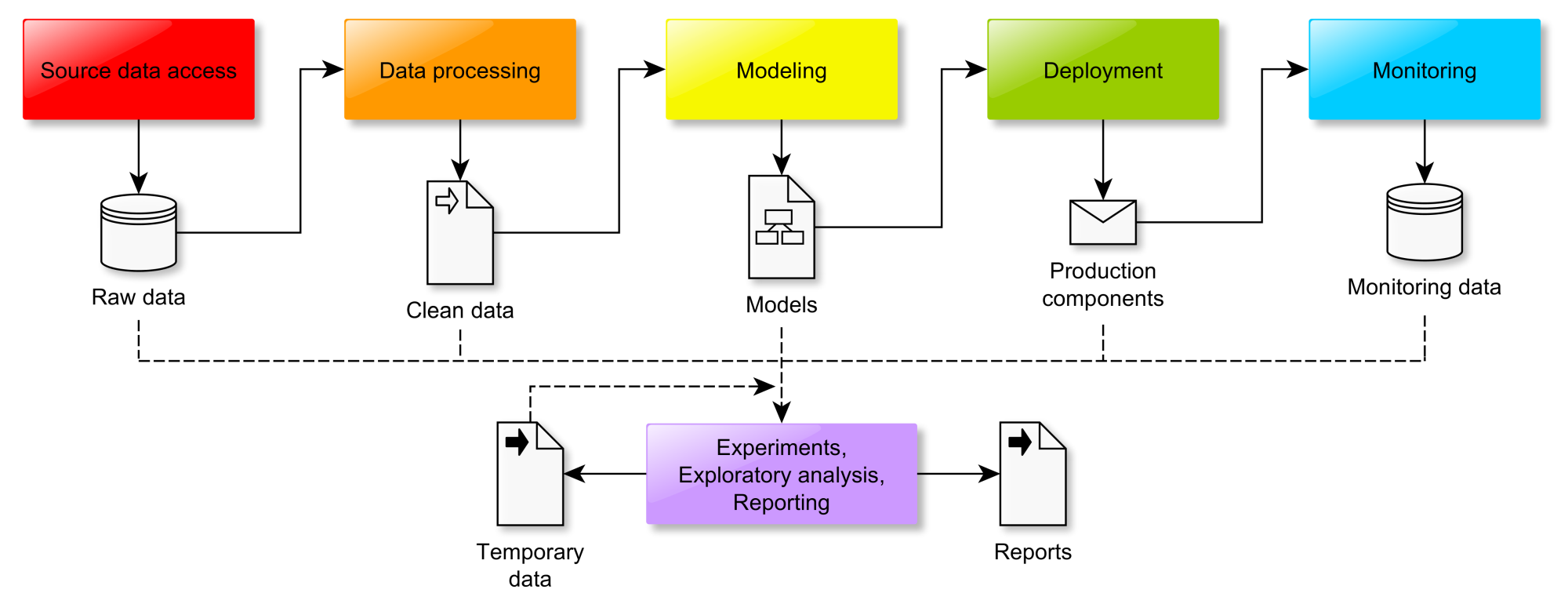
Colored boxes denote the key processes while icons are the respective inputs and outputs. Depending on the project, the focus may be on one process or another. Some of them may be rather complex while others trivial or missing. For example, scientific data analysis projects would often lack the "Deployment" and "Monitoring" components. Let us now consider each step one by one.
Source data access
Whether you are working on the human genome or playing with iris.csv, you typically have some notion of "raw source data" you start your project with. It may be a directory of *.csv files, a table in an SQL server or a HDFS cluster. The data may be fixed, constantly changing, automatically generated or streamed. It could be stored locally or in the cloud. In any case, your first step is to define access to the source data. Here are some examples of how this may look like:
- Your source data is provided as a set of
*.csvfiles. You follow the cookiecutter-data-science approach, make adata/rawsubdirectory in your project's root folder, and put all the files there. You create thedocs/data.rstfile, where you describe the meaning of your source data. (Note: Cookiecutter-DataScience template actually recommendsreferences/as the place for data dictionaries, while I pesonally preferdocs. Not that it matters much). - Your source data is provided as a set of
*.csvfiles. You set up an SQL server, create a schema namedrawand import all your CSV files as separate tables. You create thedocs/data.rstfile, where you describe the meaning of your source data as well as the location and access procedures for the SQL server. - Your source data is a messy collection of genome sequence files, patient records, Excel files and Word documents, which may later grow in unpredicted ways. In addition, you know that you will need to query several external websites to receive extra information. You create an SQL database server in the cloud and import most of the tables from Excel files there. You create the
data/rawdirectory in your project, put all the huge genome sequence files into the dna subdirectory. Some of the Excel files were too dirty to be imported into a database table, so you store them indata/raw/unprocesseddirectory along with the Word files. You create an Amazon S3 bucket and push your wholedata/rawdirectory there using DVC. You create a Python package for querying the external websites. You create thedocs/data.rstfile, where you specify the location of the SQL server, the S3 bucket, the external websites, describe how to use DVC to download the data from S3 and the Python package to query the websites. You also describe, to the best of your understanding, the meaning and contents of all the Excel and Word files as well as the procedures to be taken when new data is added. - Your source data consists of constantly updated website logs. You set up the ELK stack and configure the website to stream all the new logs there. You create
docs/data.rst, where you describe the contents of the log records as well as the information needed to access and configure the ELK stack. - Your source data consists of 100'000 colored images of size 128x128. You put all the images together into a single tensor of size 100'000 x 128 x 128 x 3 and save it in an HDF5 file
images.h5. You create a Quilt data package and push it to your private Quilt repository. You create thedocs/data.rstfile, where you describe that in order to use the data it must first be pulled into the workspace viaquilt install mypkg/imagesand then imported in code viafrom quilt.data.mypkg import images. - Your source data is a simulated dataset. You implement the dataset generation as a Python class and document its use in a
README.txtfile.
In general, remember the following rules of thumb when setting up the source data:
- Whenever you can meaningfully store your source data in a conveniently queryable/indexable form (an SQL database, the ELK stack, an HDF5 file or a raster database), you should do it. Even if your source data is a single
csvand you are reluctant to set up a server, do yourself a favor and import it into an SQLite file, for example. If your data is nice and clean, it can be as simple as:import sqlalchemy as sa import pandas as pd e = sa.create_engine("sqlite:///raw_data.sqlite") pd.read_csv("raw_data.csv").to_sql("raw_data", e) - If you work in a team, make sure the data is easy to share. Use an NFS partition, an S3 bucket, a Git-LFS repository, a Quilt package, etc.
- Make sure your source data is always read-only and you have a backup copy.
- Take your time to document the meaning of all of your data as well as its location and access procedures.
- In general, take this step very seriously. Any mistake you make here, be it an invalid source file, a misunderstood feature name, or a misconfigured server may waste you a lot of time and effort down the road.
Data processing
The aim of the data processing step is to turn the source data into a "clean" form, suitable for use in the following modeling stage. This "clean" form is, in most cases, a table of features, hence the gist of "data processing" often boils down to various forms of feature engineering. The core requirements here are to ensure that the feature engineering logic is maintainable, the target datasets are reproducible and, sometimes, that the whole pipeline is traceable to the source representations (otherwise you would not be able to deploy the model). All these requirements can be satisfied, if the processing is organized in an explicitly described computation graph. There are different possibilities for implementing this graph, however. Here are some examples:
- You follow the cookiecutter-data-science route and use Makefiles to describe the computation graph. Each step is implemented in a script, which takes some data file as input and produces a new data file as output, which you store in the
data/interimordata/processedsubdirectories of your project. You enjoy easy parallel computation viamake -j <njobs>. - You rely on DVC rather than Makefiles to describe and execute the computation graph. The overall procedure is largely similar to the solution above, but you get some extra convenience features, such as easy sharing of the resulting files.
- You use Luigi, Airflow or any other dedicated workflow management system instead of Makefiles to describe and execute the computation graph. Among other things this would typically let you observe the progress of your computations on a fancy web-based dashboard, integrate with a computing cluster's job queue, or provide some other tool-specific benefits.
- All of your source data is stored in an SQL database as a set of tables. You implement all of the feature extraction logic in terms of SQL views. In addition, you use SQL views to describe the samples of objects. You can then use these feature- and sample-views to create the final modeling datasets using auto-generated queries like
select s.Key v1.AverageTimeSpent, v1.NumberOfClicks, v2.Country v3.Purchase as Target from vw_TrainSample s left join vw_BehaviourFeatures v1 on v1.Key = s.Key left join vw_ProfileFeatures v2 on v2.Key = s.Key left join vw_TargetFeatures v3 on v3.Key = s.Key
This particular approach is extremely versatile, so let me expand on it a bit. Firstly, it lets you keep track of all the currently defined features easily without having to store them in huge data tables - the feature definitions are only kept as code until you actually query them. Secondly, the deployment of models to production becomes rather straightforward - assuming the live database uses the same schema, you only need to copy the respective views. Moreover, you may even compile all the feature definitions into a single query along with the final model prediction computation using a sequence of CTE statements:
with _BehaviourFeatures as ( ... inline the view definition ... ), _ProfileFeatures as ( ... inline the view definition ... ), _ModelInputs as ( ... concatenate the feature columns ... ) select Key, 1/(1.0 + exp(-1.2 + 2.1*Feature1 - 0.2*Feature3)) as Prob from _ModelInputsThis technique has been implemented in one in-house data science workbench tool of my design (not publicly available so far, unfortunately) and provides a very streamlined workflow.
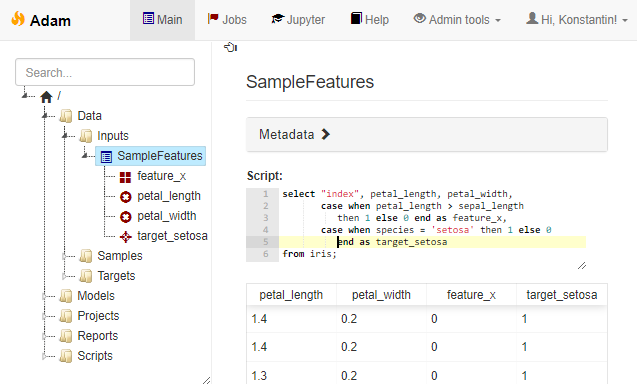
Example of an SQL-based feature engineering pipeline
No matter which way you choose, keep these points in mind:
- Always organize the processing in the form of a computation graph and keep reproducibility in mind.
- This is the place where you have to think about the compute infrastructure you may need. Do you plan to run long computations? Do you need to parallelize or rent a cluster? Would you benefit from a job queue with a management UI for tracking task execution?
- If you plan to deploy the models into production later on, make sure your system will support this use case out of the box. For example, if you are developing a model to be included in a Java Android app, yet you prefer to do your data science in Python, one possibility for avoiding a lot of hassle down the road would be to express all of your data processing in a specially designed DSL rather than free-from Python. This DSL may then be translated into Java or an intermediate format like PMML.
- Consider storing some metadata about your designed features or interim computations. This does not have to be complicated - you can save each feature column to a separate file, for example, or use Python function annotations to annotate each feature-generating function with a list of its outputs. If your project is long and involves several people designing features, having such a registry may end up quite useful.
Modeling
Once you have done cleaning your data, selecting appropriate samples and engineering useful features, you enter the realm of modeling. In some projects all of the modeling boils down to a single m.fit(X,y) command or a click of a button. In others it may involve weeks of iterations and experiments. Often you would start with modeling way back in the "feature engineering" stage, when you decide that outputs of one model make for great features themselves, so the actual boundary between this step and the previous one is vague. Both steps should be reproducible and must make part of your computation graph. Both revolve around computing, sometimes involving job queues or clusters. None the less, it still makes sense to consider the modeling step separately, because it tends to have a special need: experiment management. As before, let me explain what I mean by example.
- You are training models for classifying Irises in the
iris.csvdataset. You need to try out ten or so standardsklearnmodels, applying each with a number of different parameter values and testing different subsets of your handcrafted features. You do not have a proper computation graph or computing infrastructure set up - you just work in a single Jupyter notebook. You make sure, however, that the results of all training runs are saved in separate pickle files, which you can later analyze to select the best model. - You are designing a neural-network-based model for image classification. You use ModelDB (or an alternative experiment management tool, such as TensorBoard, Sacred, FGLab, Hyperdash, FloydHub, Comet.ML, DatMo, MLFlow, ...) to record the learning curves and the results of all the experiments in order to choose the best one later on.
- You implement your whole pipeline using Makefiles (or DVC, or a workflow engine). Model training is just one of the steps in the computation graph, which outputs a
model-<id>.pklfile, appends the model final AUC score to a CSV file and creates amodel-<id>.htmlreport, with a bunch of useful model performance charts for later evaluation. - This is how experiment management / model versioning looks in the UI of the custom workbench mentioned above:
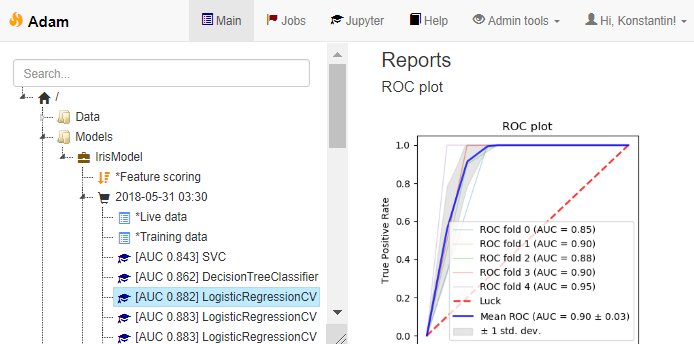
Experiment management
The takeaway message: decide on how you plan to manage fitting multiple models with different hyperparameters and then selecting the best result. You do not have to rely on complex tools - sometimes even a manually updated Excel sheet works well, when used consistently. If you plan lengthy neural network trainings, however, do consider using a web-based dashboard. All the cool kids do it.
Model deployment
Unless your project is purely exploratory, chances are you will need to deploy your final model to production. Depending on the circumstances this can turn out to be a rather painful step, but careful planning will alleviate the pain. Here are some examples:
- Your modeling pipeline spits out a pickle file with the trained model. All of your data access and feature engineering code was implemented as a set of Python functions. You need to deploy your model into a Python application. You create a Python package which includes the necessary function and the model pickle file as a file resource inside. You remember to test your code. The deployment procedure is a simple package installation followed by a run of integration tests.
- Your pipeline spits out a pickle file with the trained model. To deploy the model you create a REST service using Flask, package it as a docker container and serve via your company's Kubernetes cloud. Alternatively, you upload the saved model to an S3 bucket and serve it via Amazon Lambda. You make sure your deployment is tested.
- Your training pipeline produces a TensorFlow model. You use Tensorflow Serving (or any of the alternatives) to serve it as a REST service. You do not forget to create tests and run them every time you update the model.
- Your pipeline produces a PMML file. Your Java application can read it using the JPMML library. You make sure that your PMML exporter includes model validation tests in the PMML file.
- Your pipeline saves the model and the description of the preprocessing steps in a custom JSON format. To deploy it into your C# application you have developed a dedicated component which knows how to load and execute these JSON-encoded models. You make sure you have 100% test coverage of your model export code in Python, the model import code in C# and predictions of each new model you deploy.
- Your pipeline compiles the model into an SQL query using SKompiler. You hard-code this query into your application. You remember about testing.
- You train your models via a paid service, which also offers a way to publish them as REST (e.g. Azure ML Studio, YHat ScienceOps). You pay a lot of money, but you still test the deployment.
Summarizing this:
- There are many ways how a model can be deployed. Make sure you understand your circumstances and plan ahead. Will you need to deploy the model into a codebase written in a different language than the one you use to train it? If you decide to serve it via REST, what load does the service expect, should it be capable of predicting in batches? If you plan to buy a service, estimate how much it will cost you. If you decide to use PMML, make sure it can support your expected preprocessing logic and that fancy Random Forest implementation you plan to use. If you used third party data sources during training, think whether you will need to integrate with them in production and how will you encode this access information in the model exported from your pipeline.
- As soon as you deploy your model to production, it turns from an artefact of data science to actual code, and should therefore be subject to all the requirements of application code. This means testing. Ideally, your deployment pipeline should produce both the model package for deployment as well as everything needed to test this model (e.g. sample data). It is not uncommon for the model to stop working correctly after being transferred from its birthplace to a production environment. It may be be a bug in the export code, a mismatch in the version of
pickle, a wrong input conversion in the REST call. Unless you explicitly test the predictions of the deployed model for correctness, you risk running an invalid model without even knowing it. Everything would look fine, as it will keep predicting some values, just the wrong ones.
Model monitoring
Your data science project does not end when you deploy the model to production. The heat is still on. Maybe the distribution of inputs in your training set differs from the real life. Maybe this distribution drifts slowly and the model needs to be retrained or recalibrated. Maybe the system does not work as you expected it to. Maybe you are into A-B testing. In any case you should set up the infrastructure to continuously collect data about model performance and monitor it. This typically means setting up a visualization dashboard, hence the primary example would be the following:
- For every request to your model you save the inputs and the model's outputs to logstash or a database table (making sure you stay GDPR-compliant somehow). You set up Metabase (or Tableau, MyDBR, Grafana, etc) and create reports which visualize the performance and calibration metrics of your model.
Exploration and reporting
Throughout the life of the data science project you will constantly have to sidestep from the main modeling pipeline in order to explore the data, try out various hypotheses, produce charts or reports. These tasks differ from the main pipeline in two important aspects.
Firstly, most of them do not have to be reproducible. That is, you do not absolutely need to include them in the computation graph as you would with your data preprocessing and model fitting logic. You should always try to stick to reproducibility, of course - it is great when you have all the code to regenerate a given report from raw data, but there would still be many cases where this hassle is unnecessary. Sometimes making some plots manually in Jupyter and pasting them into a Powerpoint presentation serves the purpose just fine, no need to overengineer.
The second, actually problematic particularity of these "Exploration" tasks is that they tend to be somewhat disorganized and unpredictable. One day you might need to analyze a curious outlier in the performance monitoring logs. Next day you want to test a new algorithm, etc. If you do not decide on a suitable folder structure, soon your project directory will be filled with notebooks with weird names, and no one in the team would understand what is what. Over the years I have only found one more or less working solution to this problem: ordering subprojects by date. Namely:
- You create a
projectsdirectory in your project folder. You agree that each "exploratory" project must create a folder namedprojects/YYYY-MM-DD - Subproject title, whereYYYY-MM-DDis the date when the subproject was initiated. After a year of work yourprojectsfolder looks as follows:./2017-01-19 - Training prototype/ (README, unsorted files) ./2017-01-25 - Planning slides/ (README, slides, images, notebook) ./2017-02-03 - LTV estimates/ README tasks/ (another set of date-ordered subfolders) ./2017-02-10 - Cleanup script/ README script.py ./... 50 folders more ...Note that you are free to organize the internals of each subproject as you deem necessary. In particular, it may even be a "data science project" in itself, with its own
raw/processeddata subfolders, its own Makefile-based computation graph, as well as own subprojects (which I would tend to nametasksin this case). In any case, always document each subproject (have aREADMEfile at the very least). Sometimes it helps to also have a rootprojects/README.txtfile, which briefly lists the meaning of each subproject directory.Eventually you may discover that the project list becomes too long, and decide to reorganize the
projectsdirectory. You compress some of them and move to anarchivefolder. You regroup some related projects and move them to thetaskssubdirectory of some parent project.
Exploration tasks come in two flavors. Some tasks are truly one-shot analyses, which can be solved using a Jupyter notebook that will never be executed again. Others aim to produce reusable code (not to be confused with reproducible outputs). I find it important to establish some conventions for how the reusable code should be kept. For example, the convention may be to have a file named script.py in the subproject's root which outputs an argparse-based help message when executed. Or you may decide to require providing a run function, configured as a Celery task, so it can easily be submitted to the job queue. Or it could be something else - anything is fine, as long as it is consistent.
The service checklist
There is an other, orthogonal perspective on the data science workflow, which I find useful. Namely, rather than speaking about it in terms of a pipeline of processes, we may instead discuss the key services that data science projects typically rely upon. This way you may describe your particular (or desired) setup by specifying how exactly should each of the following 9 key services be provided:

Data science services
- File storage. Your project must have a home. Often this home must be shared by the team. Is it a folder on a network drive? Is it a working folder of a Git repository? How do you organize its contents?
- Data services. How do you store and access your data? "Data" here includes your source data, intermediate results, access to third-party datasets, metadata, models and reports - essentially everything which is read by or written by a computer. Yes, keeping a bunch of HDF5 files is also an example of a "data service".
- Versioning. Code, data, models, reports and documentation - everything should be kept under some form of version control. Git for code? Quilt for data? DVC for models? Dropbox for reports? Wiki for documentation? Once we're at it, do not forget to set up regular back ups for everything.
- Metadata and documentation. How do you document your project or subprojects? Do you maintain any machine-readable metadata about your features, scripts, datasets or models?
- Interactive computing. Interactive computing is how most of the hard work is done in data science. Do you use JupyterLab, RStudio, ROOT, Octave or Matlab? Do you set up a cluster for interactive parallel computing (e.g. ipyparallel or dask)?
- Job queue & scheduler. How do you run your code? Do you use a job processing queue? Do you have the capability (or the need) to schedule regular maintenance tasks?
- Computation graph. How do you describe the computation graph and establish reproducibility? Makefiles? DVC? Airflow?
- Experiment manager. How do you collect, view and analyze model training progress and results? ModelDB? Hyperdash? FloydHub?
- Monitoring dashboard. How do you collect and track the performance of the model in production? Metabase? Tableau? PowerBI? Grafana?
The tools
To conclude and summarize the exposition, here is a small spreadsheet, listing the tools mentioned in this post (as well as some extra ones I added or will add later on), categorizing them according to which stages of the data science workflow (in the terms defined in this post) they aim to support. Disclaimer - I did try out most, but not all of them. In particular, my understanding of the capabilities of the non-free solutions in the list is so far only based on their online demos or descriptions on the site.



 from a normal distribution with unit covariance and we need to estimate the mean
from a normal distribution with unit covariance and we need to estimate the mean  of this distribution.
of this distribution.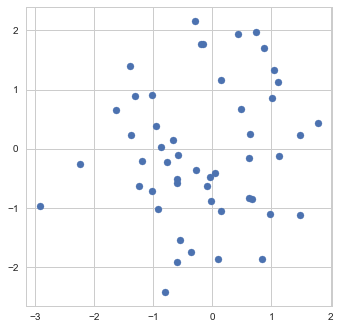
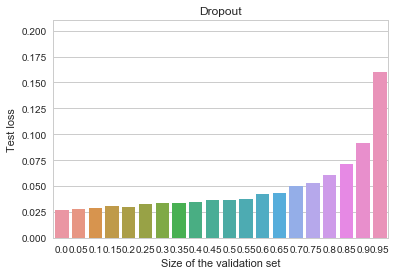
![\[f_\mathrm{train}(\mathrm{w}) := \sum_{i=1}^{50} \Vert \mathbf{x}_i - \mathbf{w}\Vert^2\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-4a4ff04b2699f9033f5d09897e4dfc5e_l3.png "Rendered by QuickLaTeX.com")
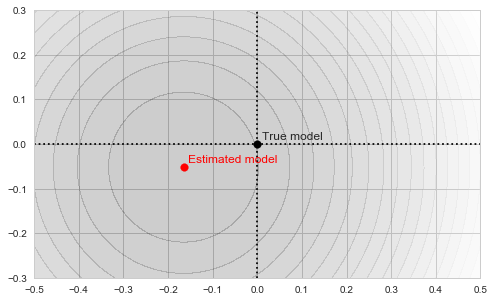
![\[f_\mathrm{fit}(\mathrm{w}) := \sum_{i=1}^{40} \Vert \mathbf{x}_i - \mathbf{w}\Vert^2\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-5adb94ca761b724a00c38b830a6bd831_l3.png "Rendered by QuickLaTeX.com")
![\[f_\mathrm{stop}(\mathrm{w}) := \sum_{i=41}^{50} \Vert \mathbf{x}_i - \mathbf{w}\Vert^2.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-8ac10bff72d2e3925e207369119b4537_l3.png "Rendered by QuickLaTeX.com")
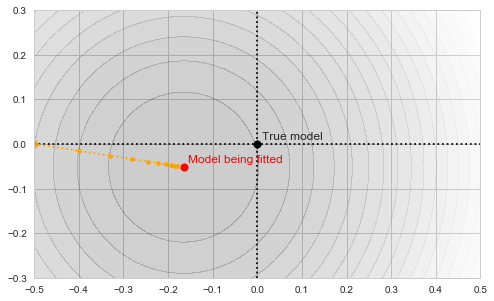
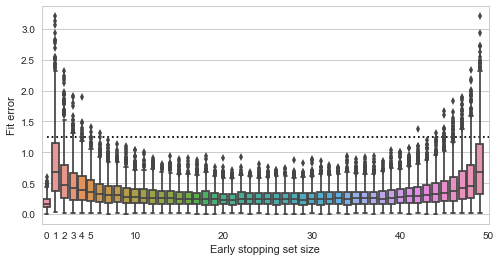
 at each step along the way:
at each step along the way: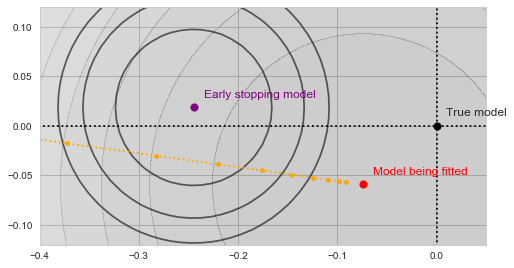
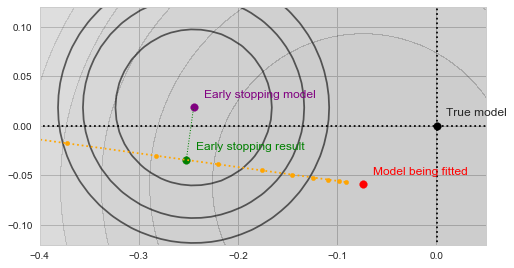
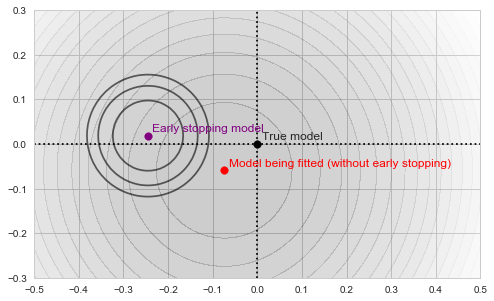
 nor of
nor of  , and are thus inherently a worse representation of the problem altogether.
, and are thus inherently a worse representation of the problem altogether.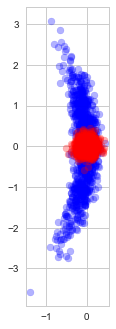
 regularization.
regularization. -penalty added to the objective:
-penalty added to the objective: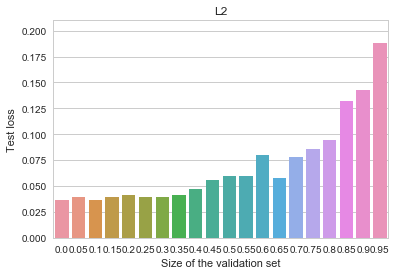
 by hashing the last block data with its own identifier. If this number is smaller than
by hashing the last block data with its own identifier. If this number is smaller than![\[\alpha \cdot \text{(account balance)}\cdot \text{(time since last block)},\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-1b685682ff93b14ab8bb39843ed2769f_l3.png "Rendered by QuickLaTeX.com")
 is a block-specific constant), the node gets the right to sign the next block. The higher the node's balance, the higher is the probability it will get a chance to sign. The rationale is that nodes with larger balances have more at stake, are more motivated to behave honestly, and thus need to be given more opportunities to participate in generating the blockchain.
is a block-specific constant), the node gets the right to sign the next block. The higher the node's balance, the higher is the probability it will get a chance to sign. The rationale is that nodes with larger balances have more at stake, are more motivated to behave honestly, and thus need to be given more opportunities to participate in generating the blockchain. .
. could be any predicate describing a "
could be any predicate describing a "![\[f(x) = \text{true, if }x = \text{number of bytes in record #42000},\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-b95048334424f46602cb92f97cec1334_l3.png "Rendered by QuickLaTeX.com")
![\[f(x) = \text{true, if }x = \text{valid, machine-verifiable}\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-8d7441cb162903be96e829fd2ba64141_l3.png "Rendered by QuickLaTeX.com")
![\[\qquad\qquad\text{proof of a complex theorem},\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-22a77946c5b92a37bd74adf61a551661_l3.png "Rendered by QuickLaTeX.com")
 satisifes the condition in record 284.
satisifes the condition in record 284. I've seen this question or variations of it pop up as "provocative" posts in social networks several times. At times they might invite lengthy discussions, where the participants would split into camps - some claim that the first statement is true, because Earth is indeed a planet of the Solar System and God did not create the Earth. Others would laugh at the stupidity of their opponents and argue that, obviously, only the second statement is correct, because it makes a valid logical implication, while the first one does not.
I've seen this question or variations of it pop up as "provocative" posts in social networks several times. At times they might invite lengthy discussions, where the participants would split into camps - some claim that the first statement is true, because Earth is indeed a planet of the Solar System and God did not create the Earth. Others would laugh at the stupidity of their opponents and argue that, obviously, only the second statement is correct, because it makes a valid logical implication, while the first one does not.![\[A \Rightarrow B\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-ea34633c938e03a2e8397d1b76fd0d76_l3.png "Rendered by QuickLaTeX.com")
 implies
implies  ". A chapter or so later you will learn that there is also a possibility to write
". A chapter or so later you will learn that there is also a possibility to write![\[A \vdash B\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-78bba64c09d2b0962343fcc9994e9bb9_l3.png "Rendered by QuickLaTeX.com")
 is the same as
is the same as  , which, in turn, is logically equivalent to
, which, in turn, is logically equivalent to  . Therefore, indeed, whenever
. Therefore, indeed, whenever  and
and  then, and why do we need the two different symbols at all? The "provocative" question above provides an opportunity to illustrate this.
then, and why do we need the two different symbols at all? The "provocative" question above provides an opportunity to illustrate this. ". Here are at least four different ways to put them formally, which make the two statements true or false in different ways.
". Here are at least four different ways to put them formally, which make the two statements true or false in different ways.![\[A, B \vdash C.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-4eb60041baefa0b8718d44bdd9fa0b37_l3.png "Rendered by QuickLaTeX.com")
![\[(A\,\&\, B) \Rightarrow C.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-5bccce433bd3a0724870f223f4fd3ced_l3.png "Rendered by QuickLaTeX.com")
![\[\vdash (A\,\&\, B) \Rightarrow C.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-402a5b95e072755957731b60556d336e_l3.png "Rendered by QuickLaTeX.com")
![\[[\text{common knowledge}] \vdash (A\,\&\, B) \Rightarrow C.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-4894dc7300b4b40aff1a16bfea854f87_l3.png "Rendered by QuickLaTeX.com")
![\[([\text{common}] \vdash A)\,\&\, ([\text{common}] \vdash B)\,\&\, (A, B\vdash C).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-8e649a393754d83b09b8ea37557c6957_l3.png "Rendered by QuickLaTeX.com")
![\[[\text{common}] \vdash A\,\&\, B\,\&\, C.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-057e5d2466a14971fb30f66ea7969d4f_l3.png "Rendered by QuickLaTeX.com")
 and
and  . The strange thing about quantum mechanical systems, though, is the fact that quantum states can be combined together to form
. The strange thing about quantum mechanical systems, though, is the fact that quantum states can be combined together to form  or a purely horizontal polarization
or a purely horizontal polarization  , but it could also be in a superposition of both vertical and horizontal states:
, but it could also be in a superposition of both vertical and horizontal states:![\[\left|\updownarrow\right\rangle + \left|\leftrightarrow\right\rangle.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-bb28888160f3db2f261b765f75e441e0_l3.png "Rendered by QuickLaTeX.com")
![\[|\mathrm{dead}\rangle + |\mathrm{alive}\rangle,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-9ecab632ef27f8b8005533935a7e456e_l3.png "Rendered by QuickLaTeX.com")
 A cat is penned up in a steel chamber, along with the following device (which must be secured against direct interference by the cat): in a
A cat is penned up in a steel chamber, along with the following device (which must be secured against direct interference by the cat): in a ![\[|\mathrm{decayed}\rangle + |\text{not decayed}\rangle,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-bbee07fd5ed01692c8e6ba84b82ad9c2_l3.png "Rendered by QuickLaTeX.com")
![\[|\mathrm{broken}\rangle + |\text{not broken}\rangle,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-e315ad2954bd24886f4661f80a42485b_l3.png "Rendered by QuickLaTeX.com")
![\[|\mathrm{dead}\rangle + |\mathrm{alive}\rangle.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-c866e5bb696ac6396beffb961eb00bf0_l3.png "Rendered by QuickLaTeX.com")
 , there is a 50% chance the photon will end up in the state
, there is a 50% chance the photon will end up in the state ![\[\{\left|\updownarrow\right\rangle: 50\%, \quad\left|\leftrightarrow\right\rangle: 50\%\}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-83c7effcd4325213c165a2ee48ff0f2d_l3.png "Rendered by QuickLaTeX.com")
![\[\{\left|\text{dead}\right\rangle: 50\%, \quad\left|\text{alive}\right\rangle: 50\%\}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-4ecaa77a523ce2911f68c8bf4eeefcb1_l3.png "Rendered by QuickLaTeX.com")
![\[\left|\text{Universe A}, \text{dead}\right\rangle + \left|\text{Universe B}, \text{alive}\right\rangle,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-29c695f7c07bd26c55d8664083cd69b3_l3.png "Rendered by QuickLaTeX.com")
![\[\mathrm{cov}(X,Y) = E[(X - E[X])(Y - E[Y])].\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-1831261b0c8298b6a3d12ddea0042089_l3.png "Rendered by QuickLaTeX.com")
 , and stop there. Later on the covariance matrix would pop up here and there in seeminly random ways. In one place you would have to take its inverse, in another - compute the eigenvectors, or multiply a vector by it, or do something else for no apparent reason apart from "that's the solution we came up with by solving an optimization task".
, and stop there. Later on the covariance matrix would pop up here and there in seeminly random ways. In one place you would have to take its inverse, in another - compute the eigenvectors, or multiply a vector by it, or do something else for no apparent reason apart from "that's the solution we came up with by solving an optimization task". has a normal (or Gaussian) distribution with mean
has a normal (or Gaussian) distribution with mean  and covariance
and covariance  if:
if:![\[\Pr({\bf x}) =|2\pi{\bf\Sigma}|^{-1/2} \exp\left(-\frac{1}{2}({\bf x} - {\bf\mu})^T{\bf\Sigma}^{-1}({\bf x} - {\bf \mu})\right).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-c72dc0af31078a6b5c06ca187d4dd3e6_l3.png "Rendered by QuickLaTeX.com")
 ) and refrain from writing out the normalizing constant
) and refrain from writing out the normalizing constant  . Now, the definition of the (centered) multivariate Gaussian looks as follows:
. Now, the definition of the (centered) multivariate Gaussian looks as follows:![\[\Pr({\bf x}) \propto \exp\left(-0.5{\bf x}^T{\bf\Sigma}^{-1}{\bf x}\right).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-a5145d00c2add0f3651f234371825cbc_l3.png "Rendered by QuickLaTeX.com")
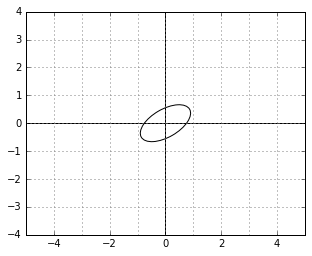
 (the identity matrix). Let us take a sample from it, which will of course be a symmetric, round cloud of points:
(the identity matrix). Let us take a sample from it, which will of course be a symmetric, round cloud of points: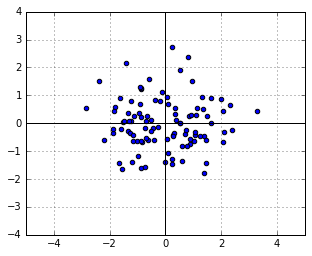
![\[P({\bf x}) \propto \exp(-0.5 {\bf x}^T {\bf x}).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-8a2ea394bef3046bc7e53d585738a238_l3.png "Rendered by QuickLaTeX.com")
 to the points, i.e. let
to the points, i.e. let  . Suppose that, for the sake of this example,
. Suppose that, for the sake of this example,  :
: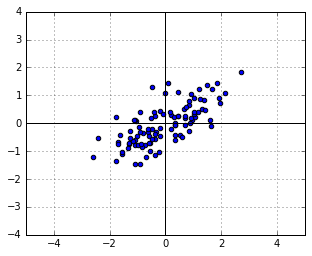
 into (1), to get:
into (1), to get:
 . The logic works both ways: if we have a Gaussian distribution with covariance
. The logic works both ways: if we have a Gaussian distribution with covariance  , and we are given
, and we are given  .
. , we can say that if our data were Gaussian, then it could have been obtained from a symmetric cloud using some transformation
, we can say that if our data were Gaussian, then it could have been obtained from a symmetric cloud using some transformation  , and we just estimated the matrix
, and we just estimated the matrix  for all rotation matrices. When we see a unit covariance matrix we really do not know, whether it is the “originally symmetric” distribution, or a “rotated symmetric distribution”. And we should not really care - those two are identical.
for all rotation matrices. When we see a unit covariance matrix we really do not know, whether it is the “originally symmetric” distribution, or a “rotated symmetric distribution”. And we should not really care - those two are identical.![\[{\bf \Sigma} = {\bf VDV}^T,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-77a7920779e813aa9d2a69434934a91c_l3.png "Rendered by QuickLaTeX.com")
 is orthogonal (i.e. a rotation) and
is orthogonal (i.e. a rotation) and  is diagonal (i.e. a coordinate-wise scaling). If we rewrite it slightly, we will get:
is diagonal (i.e. a coordinate-wise scaling). If we rewrite it slightly, we will get:![\[{\bf \Sigma} = ({\bf VD}^{1/2})({\bf VD}^{1/2})^T = {\bf AA}^T,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-2e20d88c4a3f98b68c62c23a2538d7a6_l3.png "Rendered by QuickLaTeX.com")
 . This, in simple words, means that any covariance matrix
. This, in simple words, means that any covariance matrix  followed by a rotation
followed by a rotation  . Just like in our example with
. Just like in our example with  above.
above. and thus contribute most to the spread of the data now. Can we only leave those and throw the rest out?
and thus contribute most to the spread of the data now. Can we only leave those and throw the rest out? as a
as a  and
and  , their
, their ![\[\langle {\bf v}, {\bf w}\rangle_{\Sigma^{-1}} = {\bf v}^T{\bf \Sigma}^{-1}{\bf w}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-ccde20d05d63e8aeddefc2f4e97c1bab_l3.png "Rendered by QuickLaTeX.com")
![\[|{\bf v}|_{\Sigma^{-1}} = \sqrt{{\bf v}^T{\bf \Sigma}^{-1}{\bf v}},\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-f724b1da4af1628a260d50940cbee9d0_l3.png "Rendered by QuickLaTeX.com")
![\[|{\bf v}-{\bf w}|_{\Sigma^{-1}} = \sqrt{({\bf v}-{\bf w})^T{\bf \Sigma}^{-1}({\bf v}-{\bf w})}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-99ad5ced1b604342ad5cd31d96b9c77a_l3.png "Rendered by QuickLaTeX.com")
 And here is an example of two vectors, which are considered “orthogonal”, a.k.a. “perpendicular” in this strange world:
And here is an example of two vectors, which are considered “orthogonal”, a.k.a. “perpendicular” in this strange world: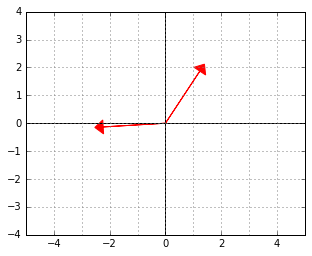
![\[{\bf v}^T{\bf \Sigma}^{-1}{\bf w} = {\bf v}^T({\bf AA}^T)^{-1}{\bf w}=({\bf A}^{-1}{\bf v})^T({\bf A}^{-1}{\bf w}),\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-de617b8c6664fb235e0fbc97b63fb9a3_l3.png "Rendered by QuickLaTeX.com")
 -“skewed” world. Somehow “deep down inside”, the ellipse thinks of itself as a circle and the two vectors behave as if they were (2,2) and (-2,2).
-“skewed” world. Somehow “deep down inside”, the ellipse thinks of itself as a circle and the two vectors behave as if they were (2,2) and (-2,2).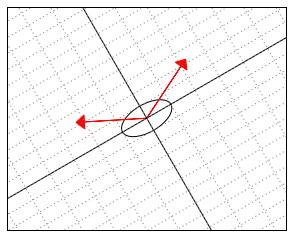
 . The PCA now becomes a method for analyzing the deformation of space, how cool is that.
. The PCA now becomes a method for analyzing the deformation of space, how cool is that. . Think of this inner product as a function
. Think of this inner product as a function  , which takes a vector
, which takes a vector  is known as the dual space to your “data space”.
is known as the dual space to your “data space”. an element of a dual space? Yes, it is, because, after all, it is a linear functional. However, the parameterization of this function is inconvenient, because, due to the skewed tensor, we cannot interpret it as projecting vectors upon
an element of a dual space? Yes, it is, because, after all, it is a linear functional. However, the parameterization of this function is inconvenient, because, due to the skewed tensor, we cannot interpret it as projecting vectors upon  . Instead, they satisfy
. Instead, they satisfy  . Things would therefore look much better if we parameterized our dual space differently. Namely, by considering linear functionals of the form
. Things would therefore look much better if we parameterized our dual space differently. Namely, by considering linear functionals of the form  . The new parameters
. The new parameters  could now indeed be interpreted as an “orthogonal direction” and things overall would make more sense.
could now indeed be interpreted as an “orthogonal direction” and things overall would make more sense.![\[f^{\Sigma^{-1}}_{\bf z}({\bf v}) = {\bf z}^T{\bf\Sigma}^{-1}{\bf v} = ({\bf \Sigma}^{-1}{\bf z})^T{\bf v} = f_{\bf w}({\bf v}),\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-84091d56adccf60763a2162ec33ba4bf_l3.png "Rendered by QuickLaTeX.com")
 . (Note that we can lose the transpose because
. (Note that we can lose the transpose because  . Or, in other words,
. Or, in other words, 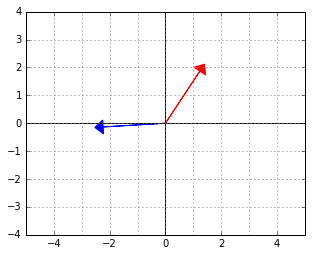
 . The red vector is an element of the “data space”, which would be mapped to 0 by this functional (because the two vectors are “orthogonal”, remember).
. The red vector is an element of the “data space”, which would be mapped to 0 by this functional (because the two vectors are “orthogonal”, remember).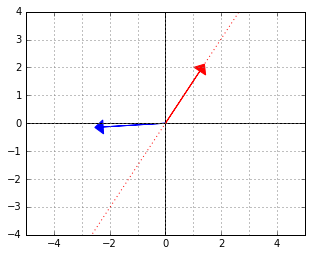
 will give us that normal. Here it is, the black arrow:
will give us that normal. Here it is, the black arrow: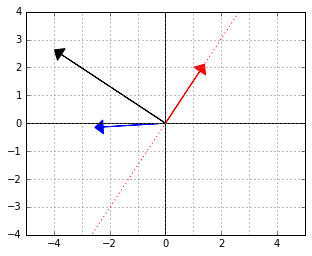
 or
or  , remember that those are simply inner products and (squared) distances in a skewed space, while
, remember that those are simply inner products and (squared) distances in a skewed space, while  are also quite common in practice. What about those?”
are also quite common in practice. What about those?” will be 1, because 2 pounds is still just 1 kilogram “deep down inside”.
will be 1, because 2 pounds is still just 1 kilogram “deep down inside”. , then
, then
 of the dual vectors. The metric tensor for the dual space must thus be:
of the dual vectors. The metric tensor for the dual space must thus be:![\[({\bf BB}^T)^{-1}=(({\bf A}^{-1})^T{\bf A}^{-1})^{-1}={\bf AA}^T={\bf \Sigma}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-30e0bda6d93e7e5c5d06f3ee12f89c77_l3.png "Rendered by QuickLaTeX.com")
 metric? This is how the unit circle looks in the corresponding
metric? This is how the unit circle looks in the corresponding 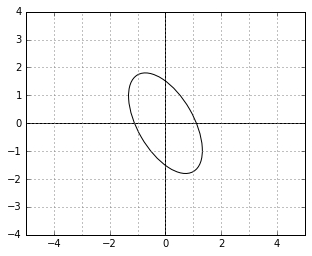
 is exactly the variance of the data along the direction
is exactly the variance of the data along the direction  ).
). (where
(where  is the data matrix) must be related to the
is the data matrix) must be related to the  .
. (vectors in the data matrix are row-wise, hence the multiplication on the right with a transpose). What is the covariance estimate of
(vectors in the data matrix are row-wise, hence the multiplication on the right with a transpose). What is the covariance estimate of  ?
?![\[{\bf Y}^T{\bf Y}/n=({\bf XA}^T)^T{\bf XA}^T/n={\bf A}({\bf X}^T{\bf X}){\bf A}^T/n\approx {\bf AA}^T,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-7fe9f5f8b90f6c7b79a42c9aaf5aa003_l3.png "Rendered by QuickLaTeX.com")
 with uncorrelated variables of unit variance and then transformed using some matrix
with uncorrelated variables of unit variance and then transformed using some matrix 

 in the relaxed state, and if we stretch it, making it longer by
in the relaxed state, and if we stretch it, making it longer by  , the two ends of the spring exert a contracting force of
, the two ends of the spring exert a contracting force of  . Assume we hold the top of the spring at the vertical coordinate
. Assume we hold the top of the spring at the vertical coordinate  and have it balance out. The lower end will then position at the coordinate
and have it balance out. The lower end will then position at the coordinate  , where the gravity force
, where the gravity force  is balanced out exactly by the spring force.
is balanced out exactly by the spring force.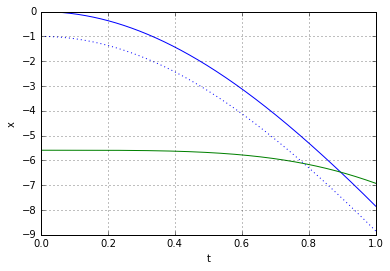
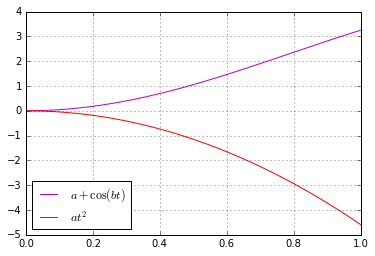
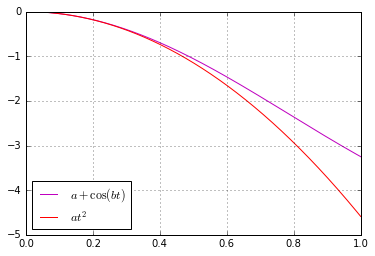
 . Recall the corresponding Taylor expansion:
. Recall the corresponding Taylor expansion:![\[\cos(x) = 1 - \frac{x^2}{2} + \frac{x^4}{24} + \dots \approx 1 - \frac{x^2}{2}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-3414db091e89e7a357cc8138d6246d9a_l3.png "Rendered by QuickLaTeX.com")
 and
and  respectively. The continuous slinky will have infinitely many points numbered
respectively. The continuous slinky will have infinitely many points numbered ![[0,1]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-25b6d943ab489c05a3dbd5ea29087a48_l3.png "Rendered by QuickLaTeX.com") .
. denote the vertical coordinate of a point
denote the vertical coordinate of a point  . The acceleration of point
. The acceleration of point  , and there are two components affecting it: the gravitational pull
, and there are two components affecting it: the gravitational pull  and the force of the spring.
and the force of the spring. . As each point is affected by the stretch from above and below, we have to consider a difference of the "top" and "bottom" stretches, which is thus
. As each point is affected by the stretch from above and below, we have to consider a difference of the "top" and "bottom" stretches, which is thus  . Consequently, the dynamics of the slinky can be described by the equation:
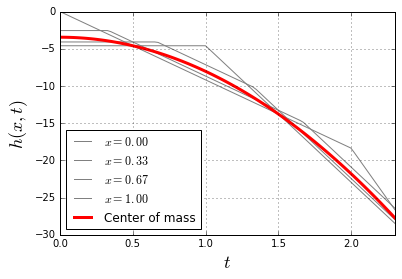
. Consequently, the dynamics of the slinky can be described by the equation:![\[\frac{\partial^2 h(x,t)}{\partial^2 t} = a\frac{\partial^2 h(x,t)}{\partial^2 x} - g.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-07981484366a38e2319cdf98ce1c32e7_l3.png "Rendered by QuickLaTeX.com")
 is some positive constant. Let us denote the second derivatives by
is some positive constant. Let us denote the second derivatives by  and
and  , replace
, replace  and rearrange to get:
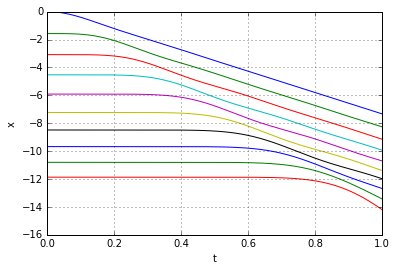
and rearrange to get:![\[h_{tt} - v^2 h_{xx} = -g,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-7d6dfe9bb994d93c9acd422979ca2a70_l3.png "Rendered by QuickLaTeX.com")
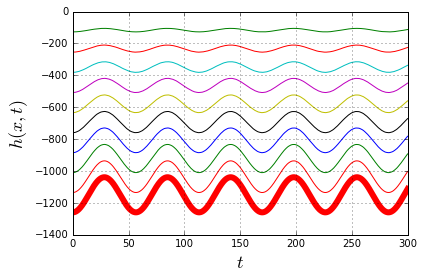
 through some medium. In our case the medium will be the slinky itself. Now it becomes apparent that, indeed, the lower end of the slinky should not move before the wave of disturbance, unleashed by releasing the top end, reaches it. Most of the explanations of the slinky drop seem to refer to that fact. However when it is stated alone, without the wave-equation-model context, it is at best a rather incomplete explanation.
through some medium. In our case the medium will be the slinky itself. Now it becomes apparent that, indeed, the lower end of the slinky should not move before the wave of disturbance, unleashed by releasing the top end, reaches it. Most of the explanations of the slinky drop seem to refer to that fact. However when it is stated alone, without the wave-equation-model context, it is at best a rather incomplete explanation. (because it is not moving at all),
(because it is not moving at all),  (because the top end is located at coordinate 0), and
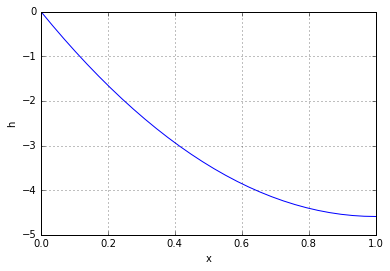
(because the top end is located at coordinate 0), and  (because there is no stretch at the bottom). Combining this with (1) and searching for a polynomial solution, we get:
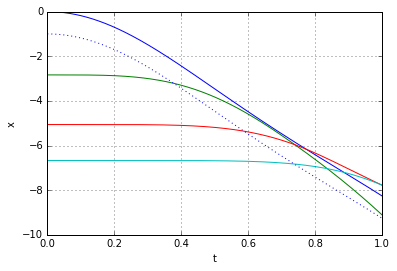
(because there is no stretch at the bottom). Combining this with (1) and searching for a polynomial solution, we get:![\[h(x, t) = h_0(x) = \frac{g}{2v^2}x(x-2).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-ccb537e0ac9d6c0c9c1419a5e3779cea_l3.png "Rendered by QuickLaTeX.com")
 and
and  disappear and we may use the
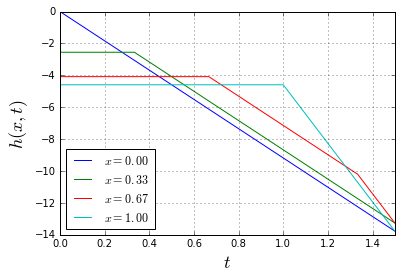
disappear and we may use the ![\[h(x,t) = \frac{1}{2}(\phi(x-vt) + \phi(x+vt)) - \frac{gt^2}{2},\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-162c239646d7b38385bb3c3b22e162f9_l3.png "Rendered by QuickLaTeX.com")
![\[\text{ where }\phi(x) = h_0(\mathrm{mod}(x, 2)).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-74110cd0e6bc77fb53f780a68a1fefca_l3.png "Rendered by QuickLaTeX.com")
 , and square it, the result can be regarded as a dot product of two "feature vectors", where the features are all pairwise products of the original inputs:
, and square it, the result can be regarded as a dot product of two "feature vectors", where the features are all pairwise products of the original inputs:
 to the third power, you are essentially computing a dot product within a space of all possible three-way products of your inputs, and so on, without ever actually having to see those features explicitly.
to the third power, you are essentially computing a dot product within a space of all possible three-way products of your inputs, and so on, without ever actually having to see those features explicitly. . We can "kernelize" it by first representing
. We can "kernelize" it by first representing  as a linear combination of the data points (this is called a
as a linear combination of the data points (this is called a ![\[f(x) = \left(\sum_i \alpha_i x_i\right)^T x + b = \sum_i \alpha_i (x_i^T x) + b,\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-21f9da75fd98376e9ab9bc50636bdd8e_l3.png "Rendered by QuickLaTeX.com")
 with a custom kernel function:
with a custom kernel function:![\[f(x) = \sum_i \alpha_i k(x_i,x) + b.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-2d96e2df41fbf5c0d519953b3871c6f1_l3.png "Rendered by QuickLaTeX.com")
 here, our model becomes a second degree polynomial regression. If
here, our model becomes a second degree polynomial regression. If  it is the fifth degree polynomial regression, etc. It's like magic, you plug in different functions and things just work.
it is the fifth degree polynomial regression, etc. It's like magic, you plug in different functions and things just work. , and, of course, the Gaussian function is one of these choices:
, and, of course, the Gaussian function is one of these choices:![\[k(x, y) = \exp\left(-\frac{|x - y|^2}{2\sigma^2}\right).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-fb0c759e10e4ae0cffed0a50acb032e1_l3.png "Rendered by QuickLaTeX.com")
 makes a kernel with a feature space, which includes all
makes a kernel with a feature space, which includes all  , for example. It is not hard to see that it corresponds to an inner product of feature vectors of the form
, for example. It is not hard to see that it corresponds to an inner product of feature vectors of the form![\[(x_1, x_2, \dots, x_n, \quad x_1x_1, x_1x_2,\dots,x_ix_j,\dots, x_n x_n),\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-99f7d81781e83520db1e527a74d645c4_l3.png "Rendered by QuickLaTeX.com")
 is also meaningful. It corresponds to scaling the corresponding features by
is also meaningful. It corresponds to scaling the corresponding features by  . For example,
. For example,  .
.![\[k(x,y) = 1 + x^Ty + \frac{(x^Ty)^2}{2} + \frac{(x^Ty)^3}{6}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-66395891b5a5e441b149a82dc978ef67_l3.png "Rendered by QuickLaTeX.com")
 and all triple products scaled down by
and all triple products scaled down by  .
.![\[\sum_{i=0}^\infty \frac{(x^Ty)^i}{i!} = \exp(x^Ty).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-169bb5c3a324c272fb520911faef293c_l3.png "Rendered by QuickLaTeX.com")
 is a valid kernel function, which corresponds to a feature space, which includes products of input features of any degree, up to infinity.
is a valid kernel function, which corresponds to a feature space, which includes products of input features of any degree, up to infinity. before feeding it to the model. This is quite often a smart idea, which improves generalization. It turns out we can do this “data normalization” without really touching the data points themselves, but by only tuning the kernel instead.
before feeding it to the model. This is quite often a smart idea, which improves generalization. It turns out we can do this “data normalization” without really touching the data points themselves, but by only tuning the kernel instead. . If we normalize the vectors before taking their inner product, we get
. If we normalize the vectors before taking their inner product, we get![\[\left(\frac{x}{|x|}\right)^T\left(\frac{y}{|y|}\right) = \frac{x^Ty}{|x||y|} = \frac{k(x,y)}{\sqrt{k(x,x)k(y,y)}}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-86156f93aa84c42485f78870af9a39f9_l3.png "Rendered by QuickLaTeX.com")

 in the denominator but by now you hopefully see that adding it is equivalent to scaling the inputs by
in the denominator but by now you hopefully see that adding it is equivalent to scaling the inputs by 
 before normalization). Simple, right?
before normalization). Simple, right? ,
,  . The value of the Gaussian kernel
. The value of the Gaussian kernel  for these inputs is:
for these inputs is:![\[k(x, y) = \exp(-0.5|1-2|^2) \approx 0.6065306597...\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-80d12497c000e4f901bd171a5db54e86_l3.png "Rendered by QuickLaTeX.com")
![\[\phi'(x) = \left(1, x, \frac{x^2}{\sqrt{2!}}, \frac{x^3}{\sqrt{3!}}, \frac{x^4}{\sqrt{4!}}, \frac{x^5}{\sqrt{5!}}\dots\right).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-3d661cde380f069bcf390789466e793e_l3.png "Rendered by QuickLaTeX.com")
 (1, 1, 0.707, 0.408, 0.204, 0.091, 0.037, 0.014, 0.005, 0.002, 0.001, 0.000, 0.000, ...)
(1, 1, 0.707, 0.408, 0.204, 0.091, 0.037, 0.014, 0.005, 0.002, 0.001, 0.000, 0.000, ...) (1, 2, 2.828, 3.266, 3.266, 2.921, 2.385, 1.803, 1.275, 0.850, 0.538, 0.324, 0.187, 0.104, 0.055, 0.029, 0.014, 0.007, 0.003, 0.002, 0.001, ...)
(1, 2, 2.828, 3.266, 3.266, 2.921, 2.385, 1.803, 1.275, 0.850, 0.538, 0.324, 0.187, 0.104, 0.055, 0.029, 0.014, 0.007, 0.003, 0.002, 0.001, ...) we just need to normalize:
we just need to normalize: (0.607, 0.607, 0.429, 0.248, 0.124, 0.055, 0.023, 0.009, 0.003, 0.001, 0.000, ...)
(0.607, 0.607, 0.429, 0.248, 0.124, 0.055, 0.023, 0.009, 0.003, 0.001, 0.000, ...) (0.135, 0.271, 0.383, 0.442, 0.442, 0.395, 0.323, 0.244, 0.173, 0.115, 0.073, 0.044, 0.025, 0.014, 0.008, 0.004, 0.002, 0.001, 0.000, ...)
(0.135, 0.271, 0.383, 0.442, 0.442, 0.395, 0.323, 0.244, 0.173, 0.115, 0.073, 0.044, 0.025, 0.014, 0.008, 0.004, 0.002, 0.001, 0.000, ...)![\[\scriptstyle\phi(1)^T\phi(2) = 0.607\cdot 0.135 + 0.607\cdot 0.271 + \dots = {\bf 0.6065306}602....\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-6c3c619ad7d23a5b02a9efb42ba5b9b9_l3.png "Rendered by QuickLaTeX.com")
 . The discrepancy is probably more due to lack of floating-point precision rather than to our approximation.
. The discrepancy is probably more due to lack of floating-point precision rather than to our approximation.
 ), hence these are not really all different features. Let us try to pack them more efficiently. As you'll see in a moment, this will open up a much nicer perspective on the feature vector in general.
), hence these are not really all different features. Let us try to pack them more efficiently. As you'll see in a moment, this will open up a much nicer perspective on the feature vector in general. must be repeated exactly
must be repeated exactly  times in our current feature vector. Thus, instead of repeating it, we could replace it with a single feature, scaled by
times in our current feature vector. Thus, instead of repeating it, we could replace it with a single feature, scaled by  . "Why the square root?" you might ask here. Because when combining a repeated feature we must preserve the overall vector norm. Consider a vector
. "Why the square root?" you might ask here. Because when combining a repeated feature we must preserve the overall vector norm. Consider a vector  , for example. Its norm is
, for example. Its norm is  , exactly the same as the norm of the single-element vector
, exactly the same as the norm of the single-element vector  .
.![\[\sqrt{\frac{n!}{a!b!}}\frac{x_1^a x_2^b}{\sqrt{n!}} = \frac{x_1^a x_2^b}{\sqrt{a!b!}} = \frac{x^a}{\sqrt{a!}}\frac{x^b}{\sqrt{b!}}.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-057fff7ee27f3b62cee6c7c547d67060_l3.png "Rendered by QuickLaTeX.com")
 = 231 features instead of 2097151. Nice!
= 231 features instead of 2097151. Nice!![\[\phi'_3(x_1, x_2) = \scriptstyle\left(1, x_1, x_2, \frac{x_1^2}{\sqrt{2!}}, \frac{x_1x_2}{\sqrt{1!1!}}, \frac{x^2}{\sqrt{2!}}, \frac{x_1^3}{\sqrt{3!}}, \frac{x_1^2x_2}{\sqrt{2!1!}}, \frac{x_1x_2^2}{\sqrt{1!2!}}, \frac{x_2^3}{\sqrt{3!}}\right).\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-c9783ab185dcb0ede49ad0adbaa145f4_l3.png "Rendered by QuickLaTeX.com")
 ,
,  (if we picked larger values, we would need to expand our feature vectors to a higher degree to get a reasonable approximation of the Gaussian kernel). Now:
(if we picked larger values, we would need to expand our feature vectors to a higher degree to get a reasonable approximation of the Gaussian kernel). Now: (1, 0.7, 0.2, 0.346, 0.140, 0.028, 0.140, 0.069, 0.020, 0.003),
(1, 0.7, 0.2, 0.346, 0.140, 0.028, 0.140, 0.069, 0.020, 0.003), (1, 0.1, 0.4, 0.007, 0.040, 0.113, 0.000, 0.003, 0.011, 0.026).
(1, 0.1, 0.4, 0.007, 0.040, 0.113, 0.000, 0.003, 0.011, 0.026). (0.768, 0.538, 0.154, 0.266, 0.108, 0.022, 0.108, 0.053, 0.015, 0.003),
(0.768, 0.538, 0.154, 0.266, 0.108, 0.022, 0.108, 0.053, 0.015, 0.003), (0.919, 0.092, 0.367, 0.006, 0.037, 0.104, 0.000, 0.003, 0.010, 0.024).
(0.919, 0.092, 0.367, 0.006, 0.037, 0.104, 0.000, 0.003, 0.010, 0.024). , what about the exact Gaussian kernel value?
, what about the exact Gaussian kernel value?![\[\exp(-0.5|x-y|^2) = 0.{\bf 81}87\dots.\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-937b3e338c9885a605aed33828832291_l3.png "Rendered by QuickLaTeX.com")
 -dimensional Gaussian kernel are:
-dimensional Gaussian kernel are:![\[\phi({\bf x})_{\bf a} = \prod_{i = 1}^d \frac{x_i^{a_i}}{\sqrt{a_i!}},\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-4b02f18f09aaa42f6c717d4606ec7fce_l3.png "Rendered by QuickLaTeX.com")
 .
. . Thus we may also state the following:
. Thus we may also state the following:![\[\phi({\bf x})_{\bf a} = \exp(-0.5|{\bf x}|^2)\prod_{i = 1}^d \frac{x_i^{a_i}}{\sqrt{a_i!}},\]](https://fouryears.eu/wp-content/ql-cache/quicklatex.com-206877da151c9fcd55ef7d50c5b279b3_l3.png "Rendered by QuickLaTeX.com")